
La connessione del sistema di controllo servo FANUC, sia che servomotore alpha o beta, nel circuito di connessione periferica ha molti luoghi simili, diviso In circa In connessione del cavo ottico, connessione di alimentazione di controllo, connessione alimentazione principale, connessione segnale di arresto di emergenza, connessione MCC, connessione istruzioni mandrino (si riferisce al mandrino seriale, Mandrino analogico collegato nel convertitore di frequenza), connessione di alimentazione principale del servomotore, connessione dell'encoder del servomotore e così via. I tipi di servoamplificatori comunemente usati sono gli amplificatori di servizio avi, beta svSP (struttura integrata), beta sVM (collegamento i/o), beta isvm (FSSB) e così via.
Il servoamplificatore FANU serie avi (SVM) viene utilizzato per guidare il motore del servizio di serie, il suo vantaggio è di piccole dimensioni (ci sono 60,90,150,300 di larghezza), dissipazione a bassa potenza
(Circa il 10% in meno della serie A), ci sono due tipi: normale e ad alta pressione, è necessario un modulo di alimentazione (PSM).

Figura (1) schema di connessione dell'amplificatore ai
Nota: vismo dopo l'accensione dell'interruttore principale, la tensione AC200V degli ingressi dell'interfaccia CX1A per il controllo dell'amplificatore servo.
Carburatore presenta DC24V tramite AC200V di PSM come alimentatore di controllo. Fornire DC24V a ogni modulo attraverso le porte CXA2A e CXA2B.
Finto dopo che la potenza del CNC è collegata e l'arresto di emergenza viene rilasciato, il segnale di aspirazione MCC MCON viene inviato tramite il cavo ottico FSSB. Allo stesso tempo, il segnale di arresto di emergenza dell'amplificatore servo è stato rimosso attraverso l'interfaccia servo amplificatore CX4.
La porta CX3 viene utilizzata per chiudere la MCC interna per controllare il cavo di alimentazione periferico.
0,46 ingresso PSM alimentatore AC200V dopo la rettifica, convertito in uscita DC300V. Va annota che richiede circa 3 secondi per DC300V in PSM da collegare dopo che l'alimentazione è stata collegata. Dopo che l'alimentazione è stata tagliata, il tempo di scarica richiede più di 20 minuti. Dopo che l'alimentazione è stata tagliata, è pericoloso toccare il terminale.
Il cablaggio di JF1/JF2/JF3 è principalmente il segnale di feedback del servomotore, incluso il segnale di rilevamento della posizione, della velocità e dell'angolo di rotazione del motore.
Milwaucop10b è un servo interfaccia bus seriale (FSSB) e il sistema CNC di connessione COP10A, COP10A è una interfaccia bus seriale servo, E la nuova unità servo della connessione COP10B (cavo ottico).
Per la serie beta diModulo servoamplificatore, L'amplificatore SPVM con mandrino è un amplificatore monolitico e il collegamento viene mostrato nella figura (2). La scatola di spina dell'amplificatore della linea di alimentazione del servomotore tre (o due) è diversa, CZ2L (il primo asse), CZ2M (il secondo asse), CZ2N (il terzo asse) corrispondente a XX, XY, YY, l'azienda FANUC generale fornisce linee elettriche, La scatola delle spine viene posizionata separatamente, gli utenti in base alla situazione attuale nel. Quindi presta attenzione alla corrispondenza uno a uno durante il caricamento.

Figura (2) schema di connessione dell'amplificatore Bi con mandrino
Descrizione: vish l'interruttore principale è acceso, controllo del servoamplificatore di ingresso dell'interfaccia TB1 con tensione AC200V.
Carburatore CZ2L/CZ2M/CZ2N(K21) viene utilizzato per guidare il motore per la rotazione dell'interfaccia.
Finto COP10B, CX4(* ESP), CX3(MCC), feedback del motore JF/JF2/JF3(K22) come riferimento alpha i l'amplificatore.
Anyon amplificatori betodi, non c' è nessuna barra di cortocircuito DC 300V su PSM negli amplificatori della serie ai. L'amplificatore convertierà ancora l'amplificatore di ingresso di potenza AC 200V in tensione DC300V, che è mostrato da uno speciale indicatore luminoso a LED sull'amplificatore. Dopo che l'alimentazione è stata tagliata, il tempo di scarica richiede più di 20 minuti. Dopo che l'alimentazione è stata tagliata, è pericoloso toccare il terminale.
La linea di alimentazione e la linea di feedback del servomotore sono schermate, quindi è necessario bloccare la schermatura, E la linea di segnale e la linea di alimentazione devono essere messa a terra separatamente per evitare l'allarme a causa di interferenze.
Per la serie di servoamplificatori beta senza mandrino, gli amplificatori sono di tipo ad asse singolo o a doppio asse senza modulo di alimentazione indipendente, che può essere diviso in tre specifiche: SVM1-4/20, SVM40/80 e due assi SVM2-20/20. La differenza principale sta nella connessione tra l'alimentatore e la linea di alimentazione del motore.
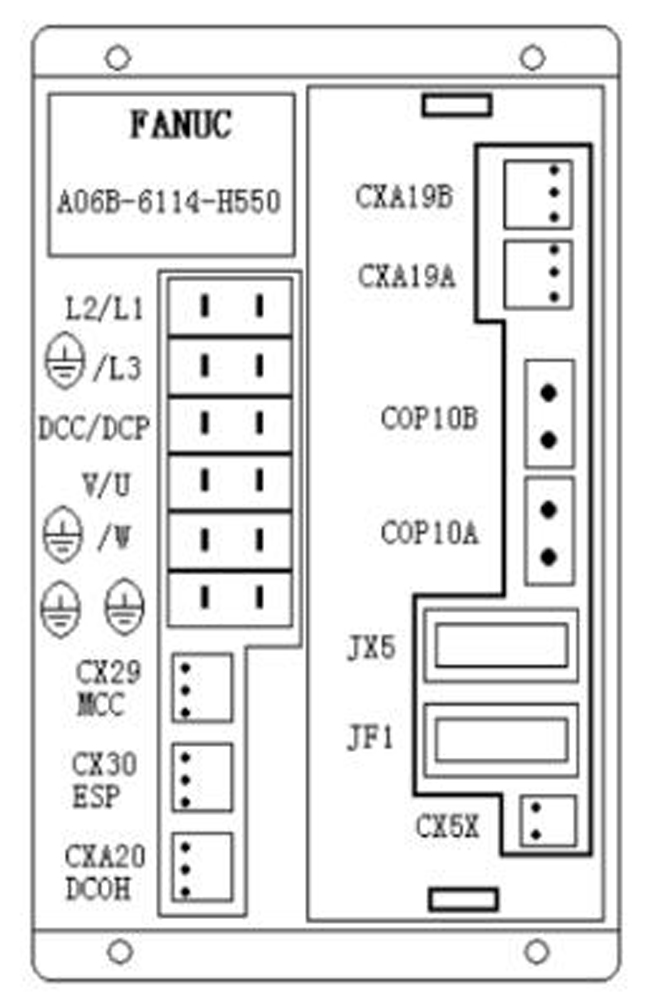
L1, L2 e L3: porte di ingresso dell'alimentatore principale.
U, V, W: interfaccia della linea di alimentazione del servomotore.
CXA19B: porta di ingresso alimentazione per il circuito di controllo DC24V, collegamento all'alimentatore regolato esterno 24V
CXA19A: porta di uscita dell'alimentazione del circuito di controllo DC24V, collegamento al successivo CXA19B della stessa unità di servizio.
COP10A: interfaccia Servo Serial Bus (FSSB) al COP10B dell'unità servo successivo (cavo ottico).
COP10B: interfaccia Servo Serial bus (FSSB) per connessione con COP10A del sistema CNC (cavo ottico)
JX5: interfaccia di segnale della scheda di rilevamento servo.
JF1: il servomotore è dotato di interfaccia di segnale encoder.
CX5X: l'encoder servomotore è l'interfaccia della batteria dell'encoder assoluto.
In sintesi, attraverso la definizione di sopra diServoamplificatori Fanuc, Servoamplificatori alpha i, amplificatori servo beta, se vuoi scegliere amplificatori servo di alta qualità per la tua applicazione, puoi prendere in mano la scelta di Ouke, che è un'azienda che fornisce servoamplificatori Fanuc, servocomandi Siemens, servomotori Mitsubishi, servomotori Fanuc, circuiti Fanuc, Ciondolo didattico Fanuc e altre società di soluzioni di automazione industriale.OukePer l'industria fornire un sistema di automazione del servizio one-stop, sarà una buona scelta.
 English
English 日本語
日本語 한국어
한국어 français
français Deutsch
Deutsch Español
Español italiano
italiano русский
русский العربية
العربية Türkçe
Türkçe Jawa
Jawa































